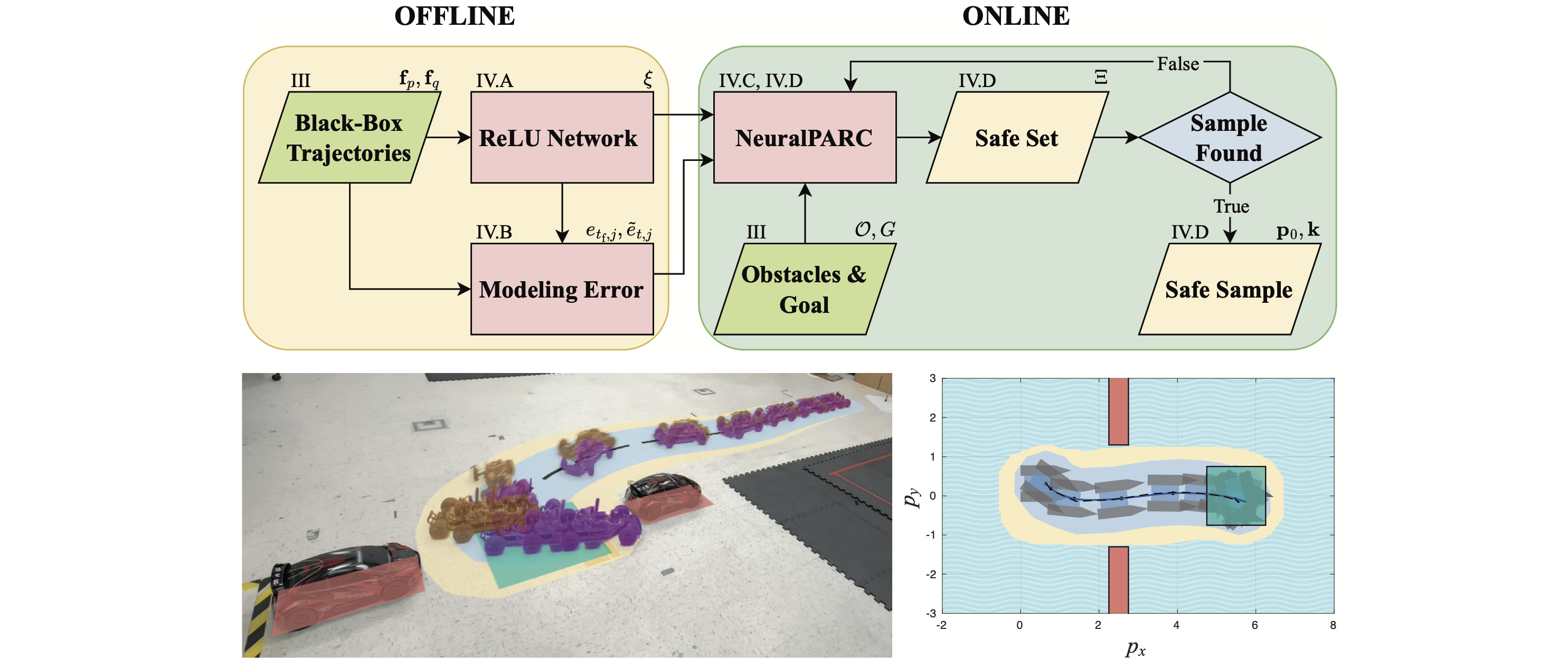
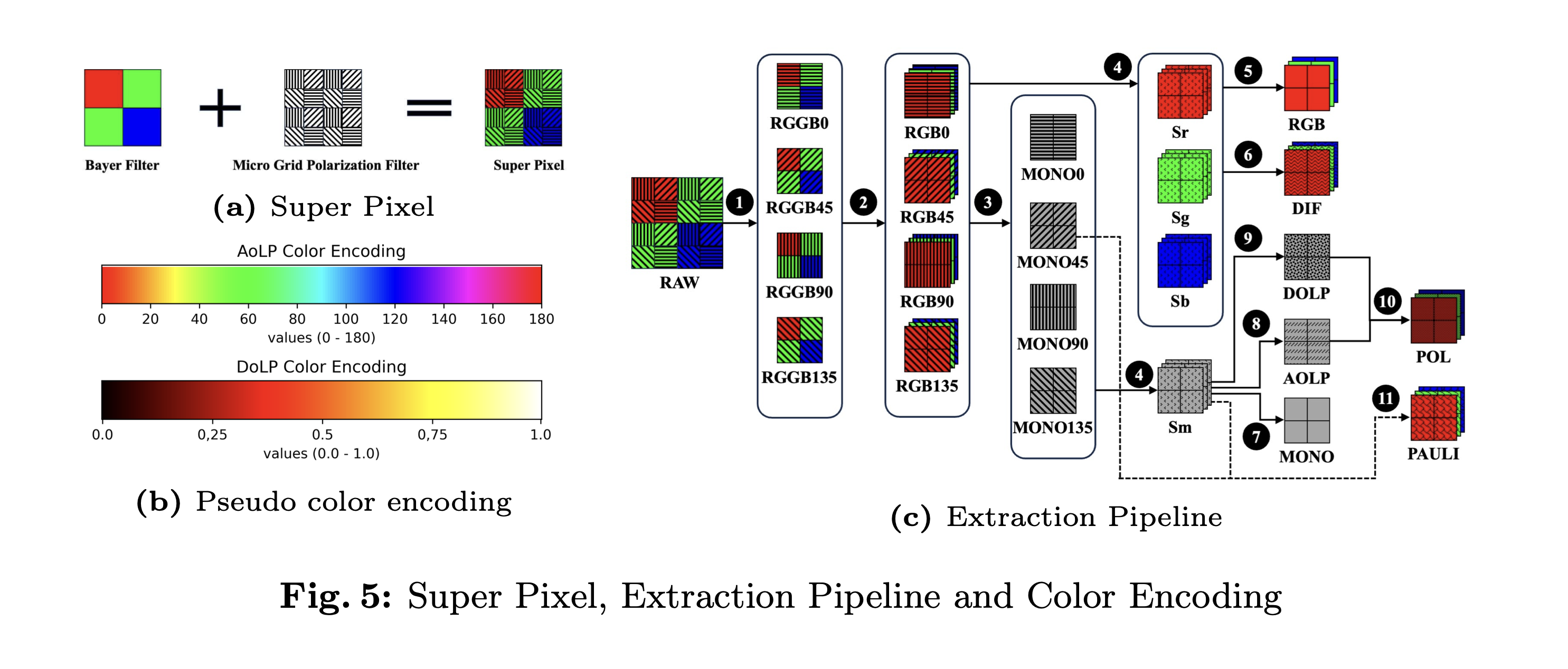
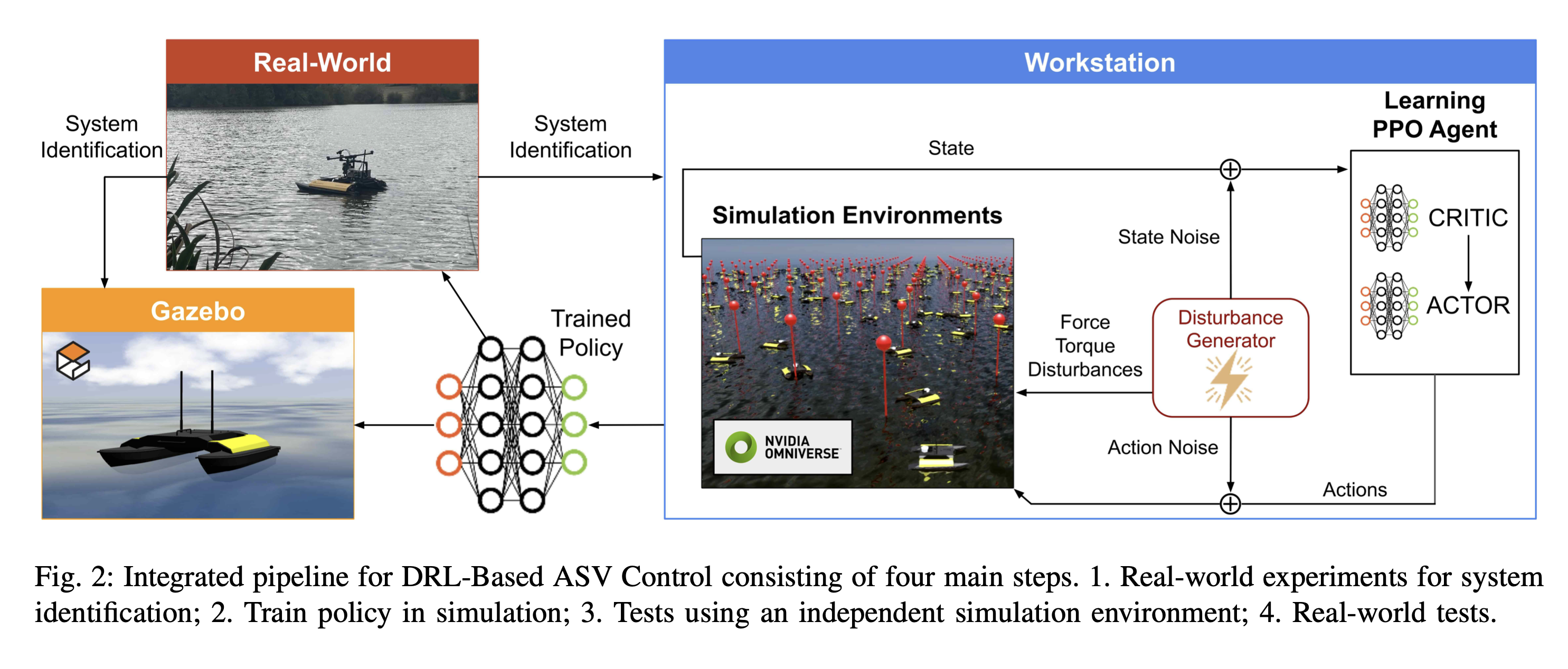
2026 T-FR Sim-to-Real Transfer and Robustness Evaluation of Reinforcement Learning Control With Integrated Perception on an ASV for Floating Waste Capture Luis F. W. Batista, Stéphanie Aravecchia, and Cédric Pradalier IEEE Transactions on Field Robotics, 2026 DOI Video 2025 VCIP Evaluation of Polarimetric Fusion for Semantic Segmentation in Aquatic Environments Luis F. W. Batista, Tom Bourbon, and Cédric Pradalier In 2025 International Conference on Visual Communications and Image Processing (VCIP), 2025 DOI TMLR RoboRAN: A Unified Robotics Framework for Reinforcement Learning-Based Autonomous Navigation Matteo El-Hariry, Antoine Richard, Ricard Marsal, and 4 more authors Transactions on Machine Learning Research, 2025 DOI W-FR Evaluating Robustness of Deep Reinforcement Learning for Autonomous Surface Vehicle Control in Field Tests Luis F. W. Batista, Stéphanie Aravecchia, Seth Hutchinson, and 1 more author Workshop on Field Robotics at ICRA, 2025 DOI ICRA Guaranteed Reach-Avoid for Black-Box Systems through Narrow Gaps via Neural Network Reachability Long Kiu Chung, Wonsuhk Jung, Srivatsank Pullabhotla, and 6 more authors In 2025 IEEE International Conference on Robotics and Automation (ICRA), 2025 DOI ECCV PoTATO: A Dataset for Analyzing Polarimetric Traces of Afloat Trash Objects Luis F. W. Batista, Salim Khazem, Mehran Adibi, and 2 more authors In Computer Vision – ECCV 2024 Workshops, 2025 DOI 2024 IROS A Deep Reinforcement Learning Framework and Methodology for Reducing the Sim-to-Real Gap in ASV Navigation Luis F. W. Batista, Junghwan Ro, Antoine Richard, and 3 more authors In 2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2024 DOI